Divine concurrency
C$PAR DOALL
In previous post I described µ²services, a system development model that is based on extrapolation of current trends in microservices and shrinking containers. I argumented that potential benefits of µ²service model might outweigh its costs. But are µ²services really technically feasible?
In this and future posts I’ll go through some of technical details both from feasibility and benefit points of view, with probably one idea per blog post to keep them manageable in size.
To summarize µ²services: µ²services is container-per-request model where a new virtual machine1 is created for each request made to the service which then handles the request and only that request and is destroyed after response is generated.
A warning for the reader: All of this is pure speculation on my part. µ²services might happen, but they might not. This is futurology. Do not think this is technology that currently exists (although technological precursors exist.)
Divine concurrency
I have previously argued that concurrency is hard and developers should primarily use language and software architecture constructs that naturally result in safe code. I think µ²services offer a way to create massively parallel service architectures where risks associated with concurrency (dead- and livelocks, mutable data and so on) are either completely eliminated or largely reduced and limited in scope.
The graph below shows a hypotethical call dependency path for a request. The service is composited of multiple smaller (micro)services which themselves are a group of µ²services. State is managed separately and the state storage mechanism is shared by all of these components (via a deployment configuration parameter). The graph could describe a conventional service as well where the colored blobs would signify a service process boundary and circles functional elements within the service.
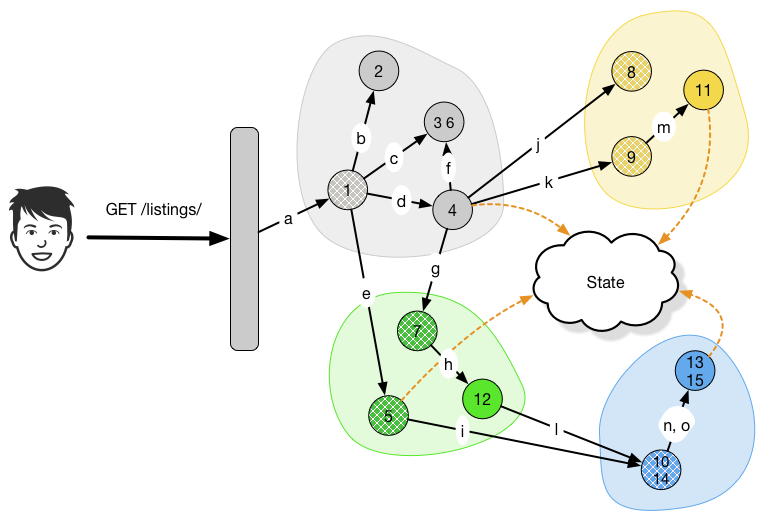
µ²services responding to a request to /listings — so
far this looks like a regular microservice.. (Letters and numbers
match those in the second graph.)
In an µ²service the colored blobs are service boundaries, a mechanism to group several different µ²service endpoints together. Perhaps they all share the same configuration elements, or same repository and release tag or similar. With µ²services a “service” is more of a convention than a fixed entity.
Individual circles represent separate µ²service endpoints, pieces of code that can be invoked externally by either users or other µ²services. When not running these are essentially templates that are instatiated when a request is received. Thus each inbound arrow in the call graph represents a new virtual machine that starts to run the service code. For example, calls c and f run the same function2 but in different virtual machines. Same applies for n and o which result in different virtual machines 13 and 15.
As described, all µ²service call graphs are acyclic — while calls “up the chain” are logically possible, they result in separate instances making the physical call graph acyclic. The graph below is another view of the same call graph, but structured to make it clear that there exist only forward dependencies. It shows the lifetime of each call (virtual machine), where each either creating a new virtual machine (request) or resulting in a termination of one (response).
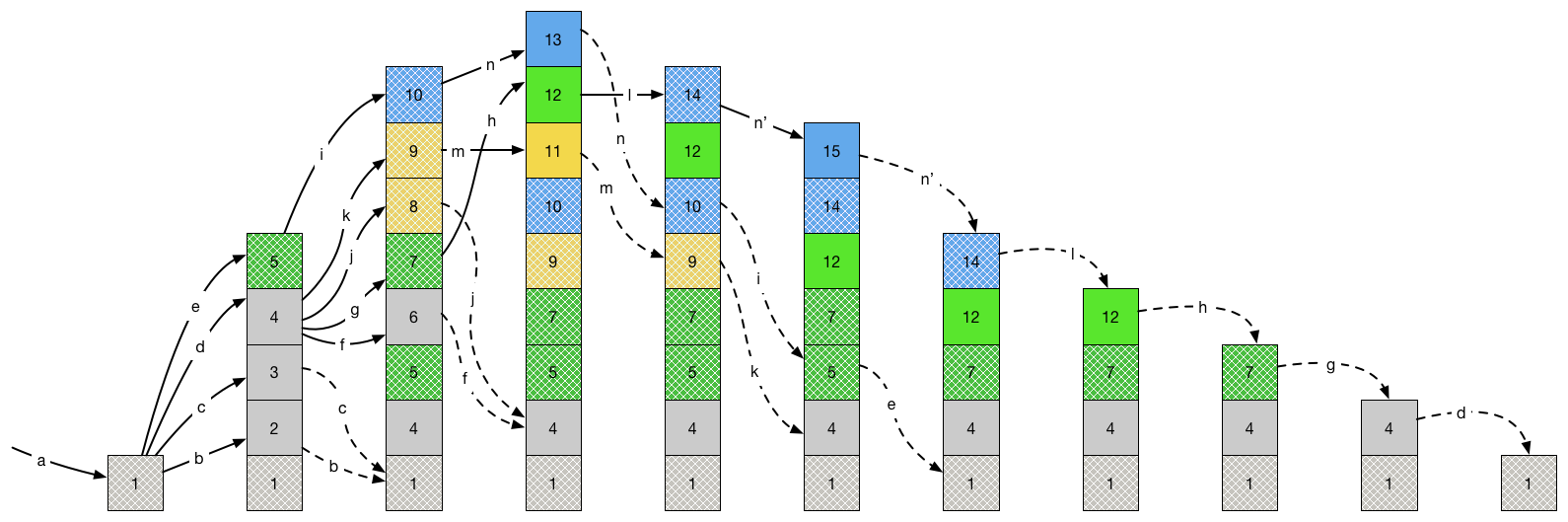
Virtual machines running concurrently when processing the request in the earlier graph.
Concurrency is difficult in monolithic services. A single spinning thread can block the whole system. Microservices offer a potential for increased concurrency by allowing concurrent requests to dependent services. µ²services with even finer service decomposition has the potential to offer even more concurrency.
Note also that since each service-to-service request is explicit they can be separately managed for failures and timeouts. Timed out requests are no longer left running — terminated requests will result in termination of their container, which will propagate request terminations further down the chain. For example in the graph above if the user terminated the request (closing the HTTP connection), it would cause instance 1 to terminate, followed recursively by all dependent instances. This would occur even if some code was stuck in an infinite loop3!
Like all things, µ²service model is not a magic dust that could turn any system into massively parallel system. It is not, and cannot be. What it can do is what Erlang as a language has done — it can make concurrent programming a little less error-prone. One benefit — compared to Erlang at least: using a different service model does not require you to learn a new programming language.
That’s all this time. I would appreciate any comments on uuservices — please share your thoughts by adding a comment below. Thanks.
-
I’m using “virtual machine” to emphasise the isolation between µ²services. Zones, containers, schmontainers, whatever… as long as all service calls are both spatially and temporally isolated. ↩
-
With function I primarily emphasise µ²service’s difference to traditional monolithic services or even microservices. µ²service functions are not programming language functions —
image.flip()is a local function call that occurs within the runtime environment of the µ²service instance. ↩ -
Here’s a question on your favourite web service framework: If you make a
GETrequest handler that will sleep for a minute and make a request to it killing the client immediately after request has been sent. When will the request handler terminate? Immediately on receiving TCP FIN? After the sleep completes? Somewhere in between? ↩
blog comments powered by Disqus